Роботизация сортировки фанеры на деревообрабатывающем производстве


Отрасли интеграции
Задачи интеграции
- Автоматизировать сортировку и перемещение тяжёлых листов фанеры весом до 60 кг
- Исключить тяжёлый ручной труд и снизить риск травм персонала
- Устранить повреждения продукции при ручных операциях
- Повысить производительность сортировочного участка
Результат интеграции
2
робота заменили ручной труд на участке сортировки
в 2
раза сокращена потребность в персонале на операции
до 60 кг
вес листов фанеры, с которыми работает комплекс
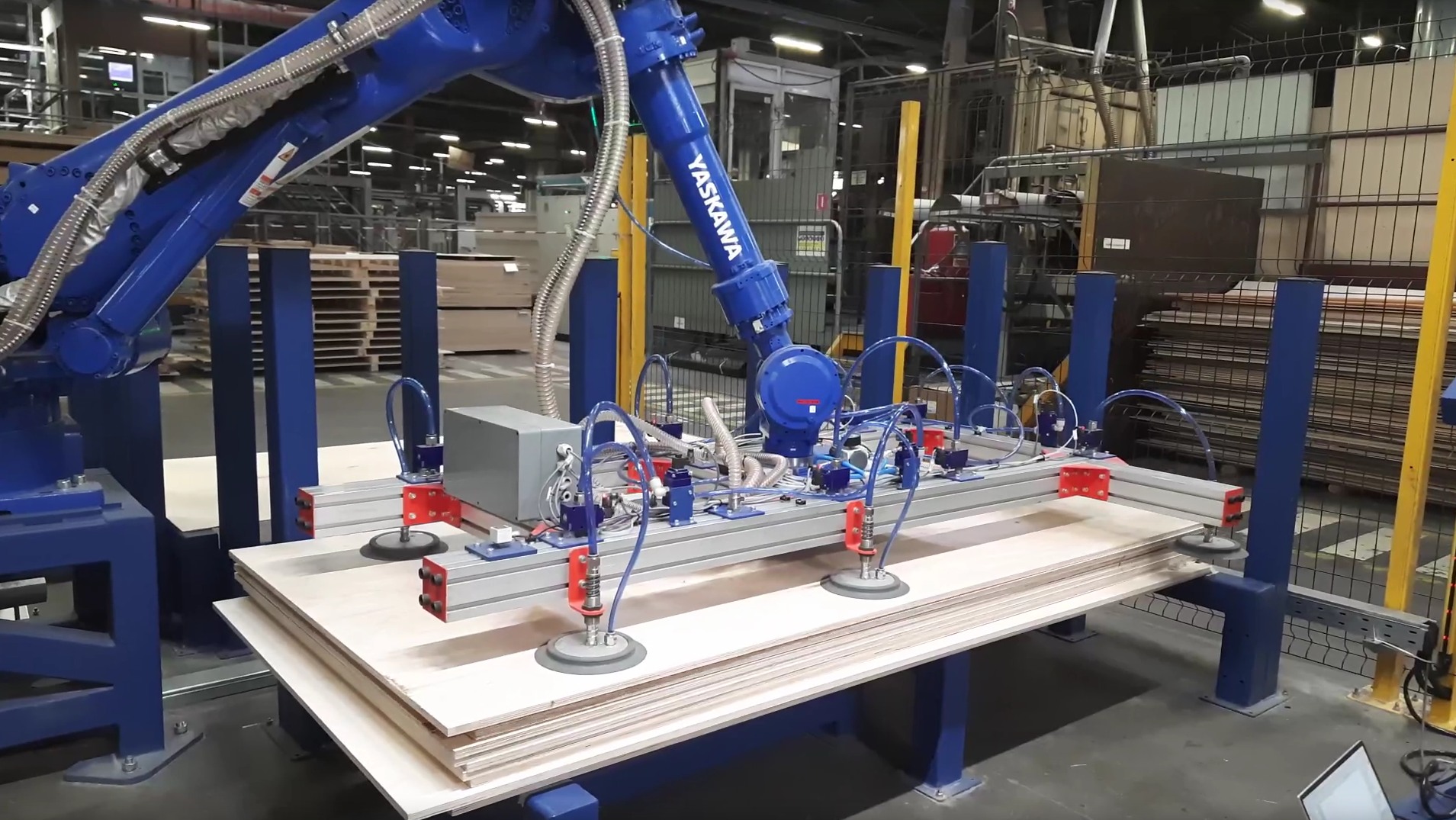
До роботизации сортировка крупноформатных листов фанеры выполнялась вручную двумя рабочими. Вес листа до 60 кг создавал высокую физическую нагрузку, риск травм и повреждения продукции при перемещении.
Для решения задачи были поставлены два робототехнических комплекса на базе промышленных роботов YASKAWA GP180. Выбор модели обусловлен характеристиками, оптимальными для работы с тяжёлыми крупногабаритными грузами:
- высокая грузоподъёмность для работы с листами весом до 60 кг;
- максимальный вылет 2,7 метра, обеспечивающий широкую рабочую зону;
- прочное запястье с высокими показателями момента и инерции;
- высокая скорость осей и ускорение для поддержания производительности.
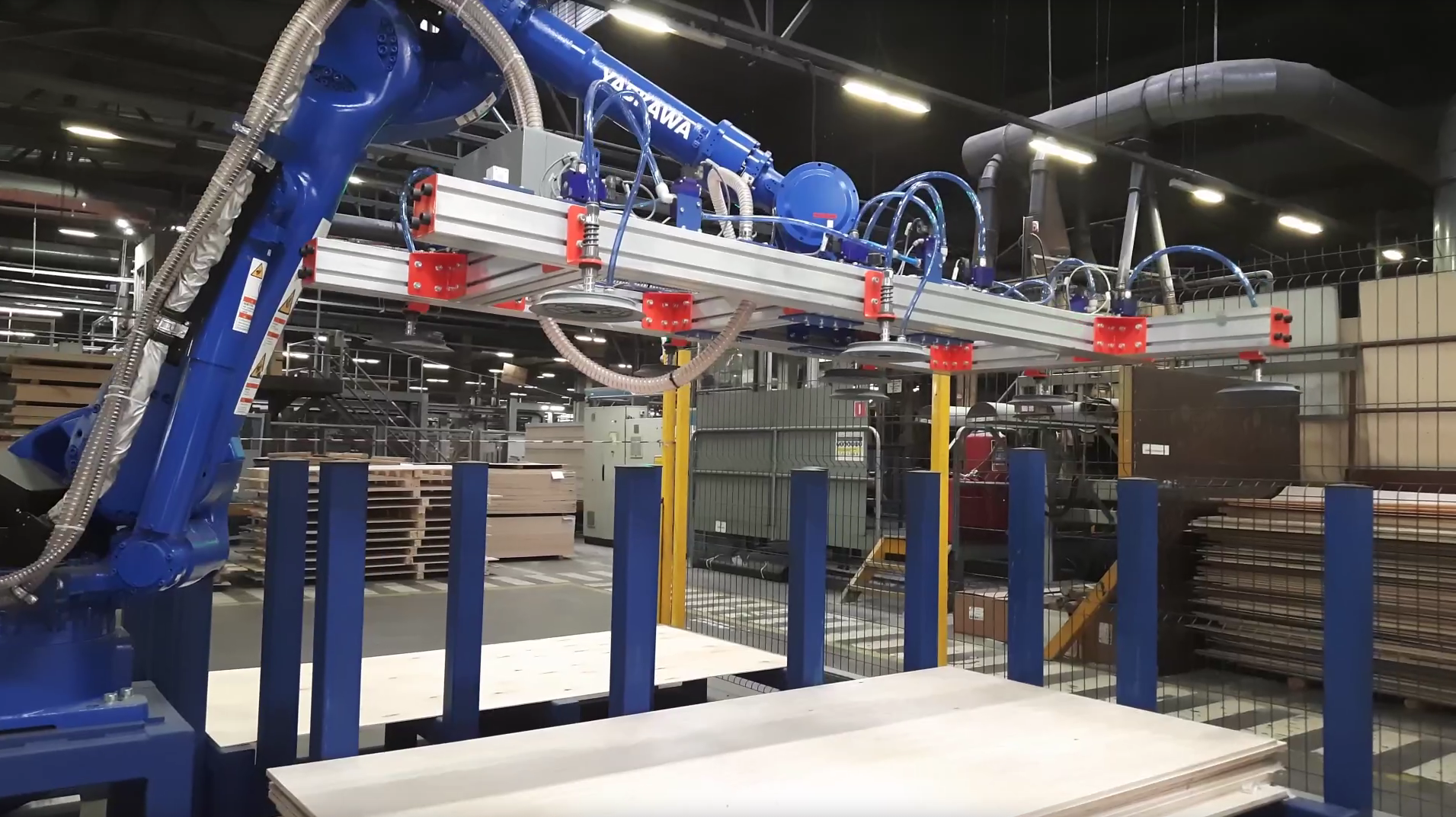
Шестиосевая конструкция робота позволяет точно позиционировать листы фанеры при сортировке и укладке, исключая удары и повреждения кромок.
Результат
Робототехнические комплексы были оперативно интегрированы в действующие процессы деревообрабатывающего производства без длительной остановки участка.
Автоматизация полностью исключила тяжёлые ручные операции с крупногабаритными грузами. Риск травм персонала и повреждения листов фанеры сведён к нулю — робот выполняет перемещение с постоянной точностью и контролируемым усилием.
Экономический эффект выразился в сокращении затрат на фонд оплаты труда: вместо двух рабочих на операции сортировки теперь задействован один оператор, контролирующий работу роботов. Высвобожденный персонал перераспределён на другие участки предприятия.
Производительность сортировочного участка выросла за счёт стабильной скорости работы роботов и отсутствия перерывов, связанных с физической усталостью операторов.